
Système d’Irrigation Agricole Intelligent utilisant Arduino Edge Control
Introduction
L’agriculture a toujours été un élément clé du développement humain. L’humanité ne cesse de croître, et la demande pour une agriculture plus efficace, rentable et respectueuse de l’environnement constitue l’un des défis sur lesquels le secteur travaille depuis plusieurs années.
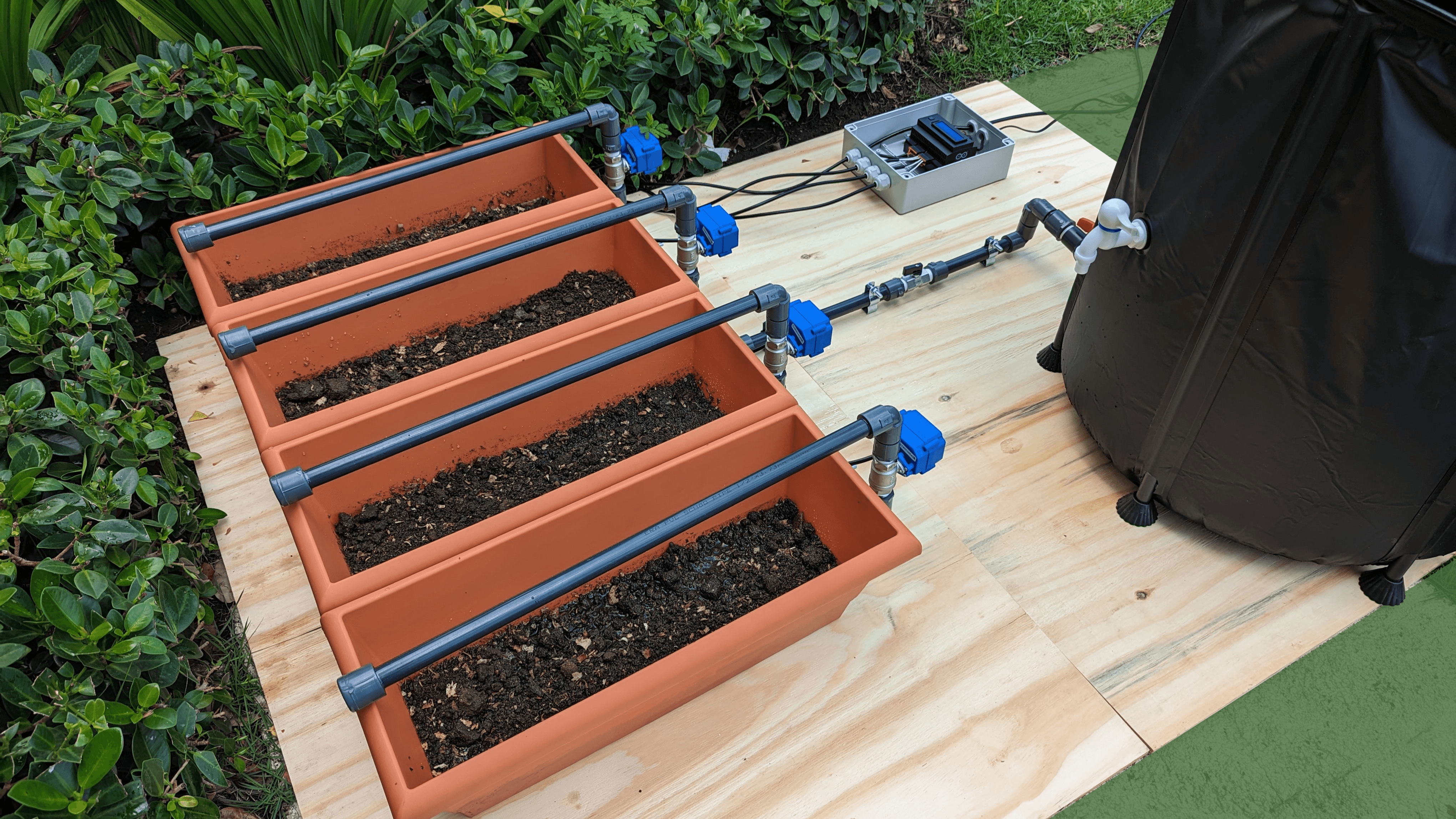
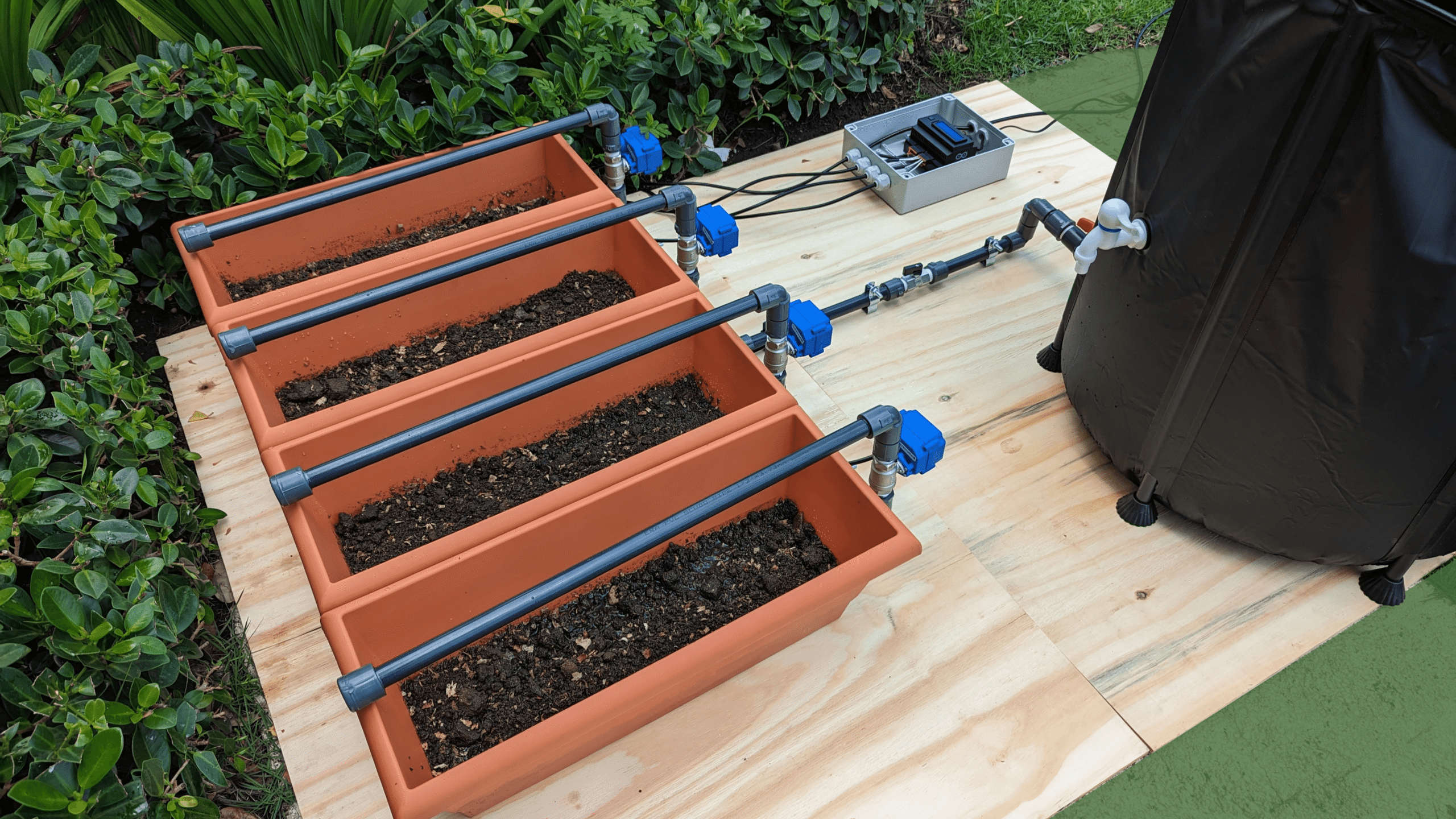
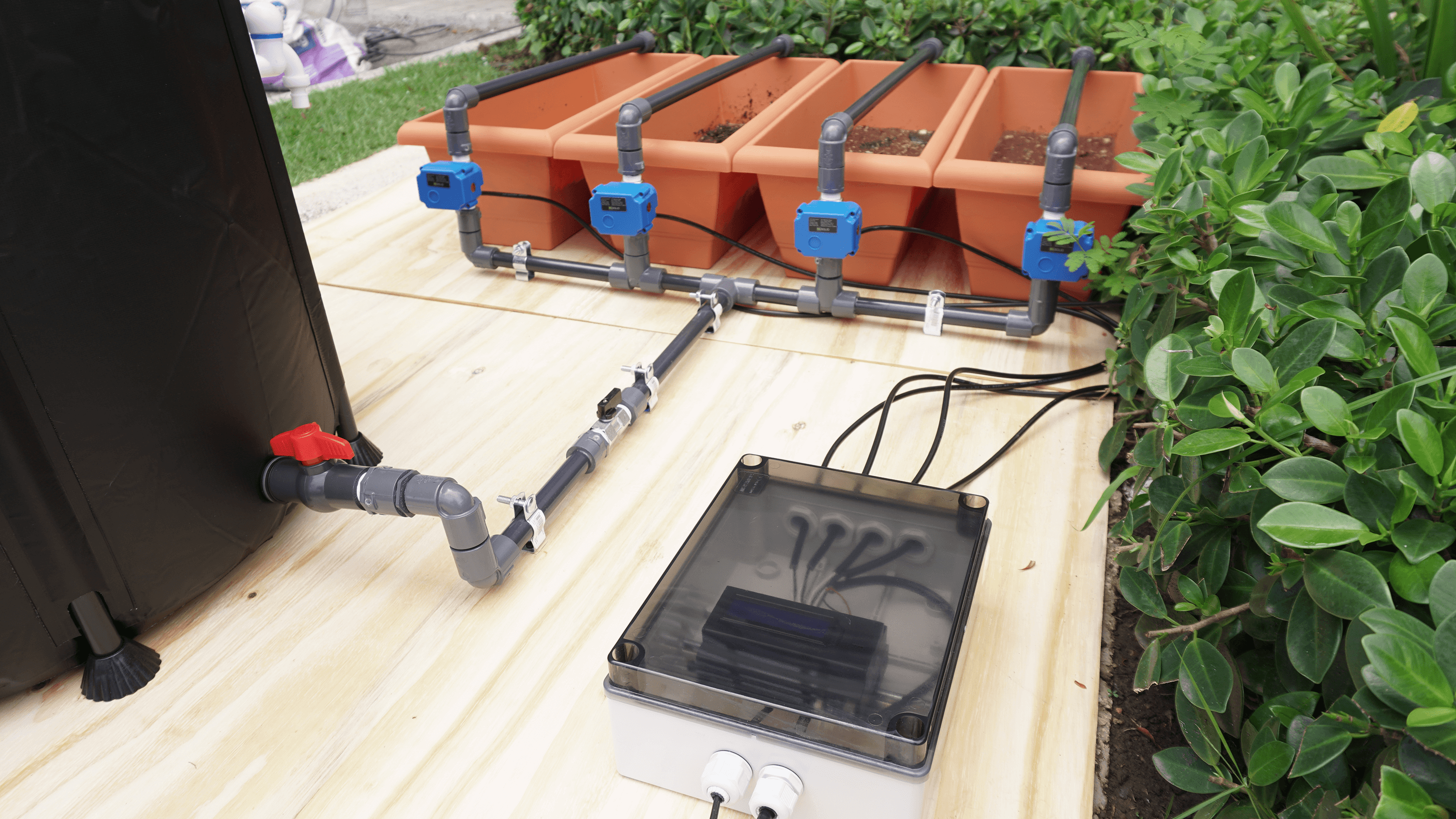
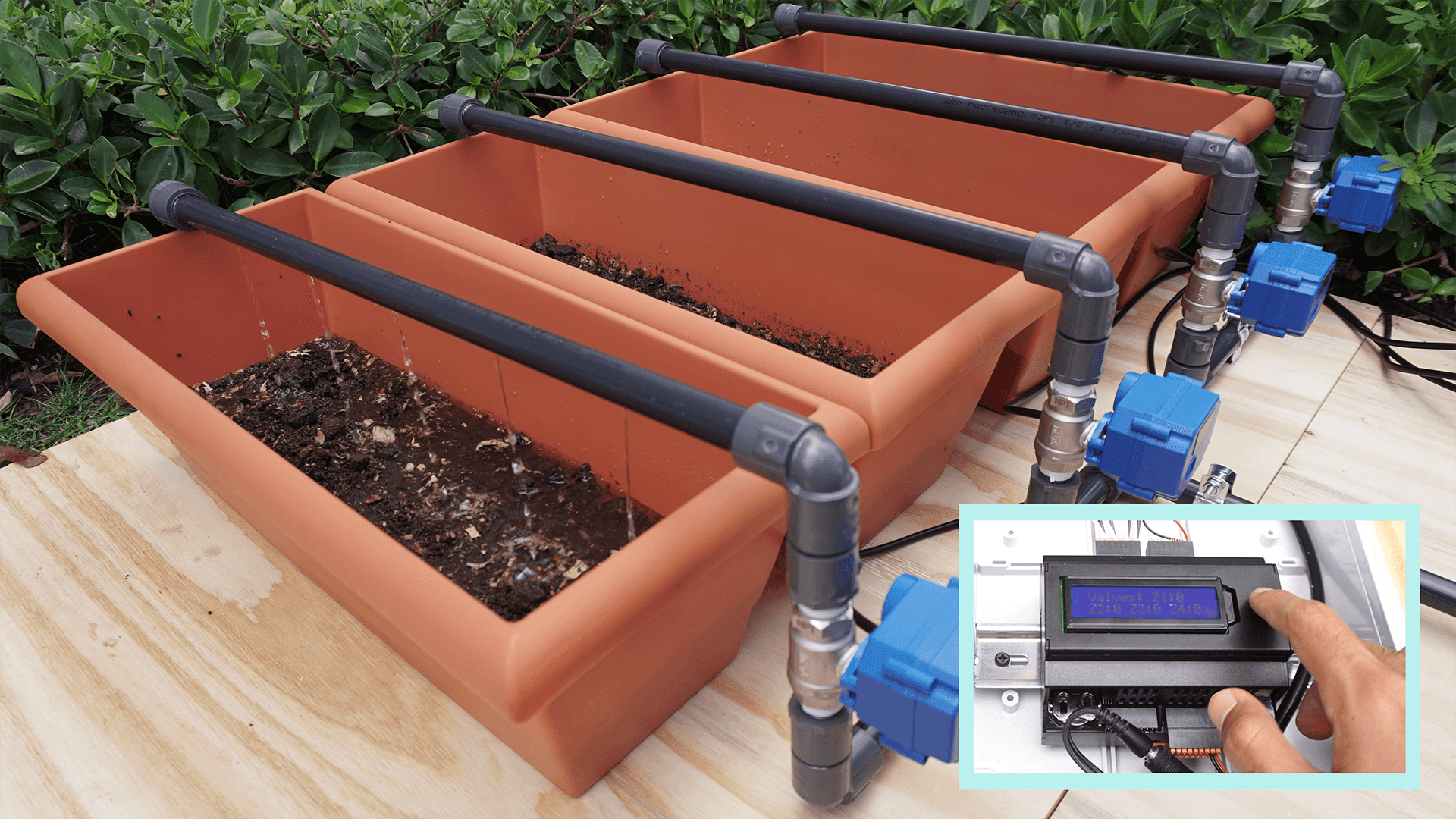
Chaque pot représente une zone d’irrigation individuelle capable d’arroser un champ de culture.
L’agriculture intelligente est aujourd’hui plus accessible que jamais grâce à la révolution technologique et l’introduction des objets connectés en agriculture. En tirant parti des capacités de contrôle, de l’analyse des données des capteurs et de la connectivité au Cloud, Arduino est parfaitement adapté à la gestion des applications agricoles.
La note d’application présentée vise à reproduire une version réduite d’une application d’agriculture intelligente, pouvant être mise en œuvre sur de véritables champs agricoles en utilisant le même matériel et le même micrologiciel.
Objectif
L’objectif de cette note d’application est de présenter un système d’irrigation agricole intelligent utilisant une combinaison d’un Edge Control, d’un MKR WiFi 1010 et de l’Arduino Cloud. Les objectifs du projet sont les suivants :
Contrôler indépendamment quatre zones d’irrigation à l’aide de vannes à bille motorisées.
Prélever l’eau d’un réservoir intelligent avec surveillance du niveau d’eau.
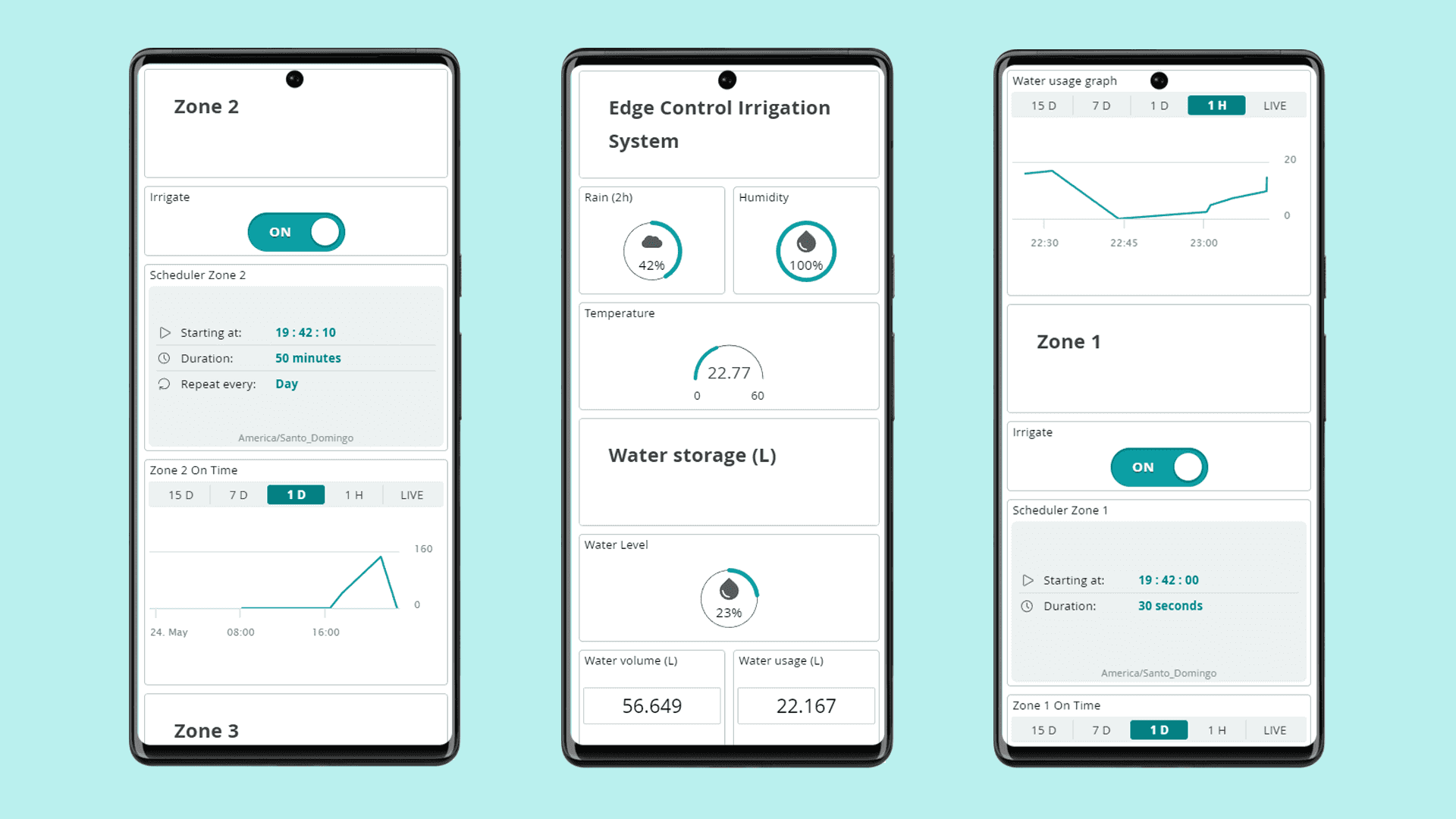
Programmer les minuteries d’irrigation à distance via Arduino Cloud, en utilisant la connectivité Wi-Fi®.
Activer manuellement l’irrigation depuis Arduino Cloud grâce à des widgets dédiés.
Surveiller le temps d’irrigation moyen et la consommation d’eau sur des graphiques dédiés dans Arduino Cloud.
Planifier l’irrigation en fonction des prévisions météorologiques, en intégrant une station météo basée sur une API dans Arduino Cloud.
Exigences matérielles et logicielles
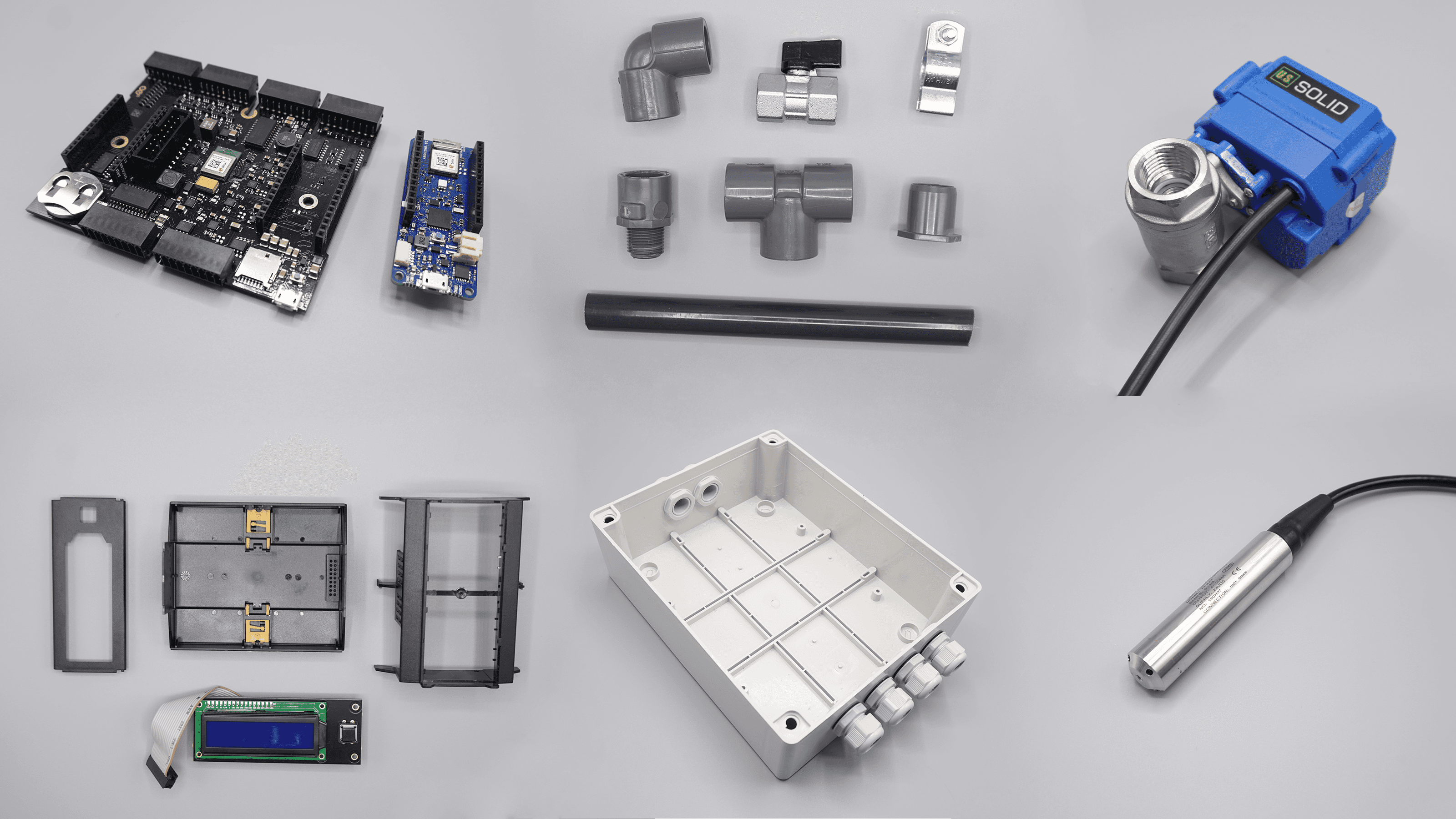
Exigences matérielles
Arduino Edge Control
Arduino MKR WiFi 1010
Kit d’enclosure pour Arduino Edge Control
Capteur de niveau liquide à pression différentielle – 4-20 mA (0-1 mètre) submersible
Vannes à bille motorisées 2 fils (les versions 3 fils sont également supportées) (x4)
Alimentation 12 VDC (x1)
3,4 mètres de tuyaux PVC de 15 mm (x1)
Té en PVC de 15 mm (x3)
Coudes en PVC de 15 mm (x8)
Robinet manuel de 15 mm (x1)
Bouchons PVC de 15 mm (x4)
Raccords mâles PVC de 15 mm (x11)
Supports muraux pour tuyaux de 15 mm (x7)
Jardinières rectangulaires (x4)
Rail DIN (x1)
Presse-étoupes (x6)
Câble duplex AWG 18 de 6 mètres (x1)
Boîte de dérivation électrique (x1)
Réservoir d’eau (x1)
Exigences logicielles
Arduino IDE 1.8.10 ou version supérieure, Arduino IDE 2, ou Arduino Cloud Editor.
Si vous utilisez un Arduino IDE hors ligne, vous devez installer les bibliothèques suivantes :
Arduino_EdgeControl
ArduinoIoTCloud
Arduino_JSON
ArduinoJson
ArduinoHttpClient
Arduino_ConnectionsHandler.
Ces bibliothèques peuvent être installées via le gestionnaire de bibliothèques de l’IDE Arduino.
Les sketches Arduino du système d’irrigation intelligent.
Arduino Create Agent pour provisionner le MKR WiFi 1010 sur Arduino Cloud.
Installation du système d’irrigation intelligent
Les connexions électriques de l’application prévue sont illustrées dans le schéma ci-dessous :
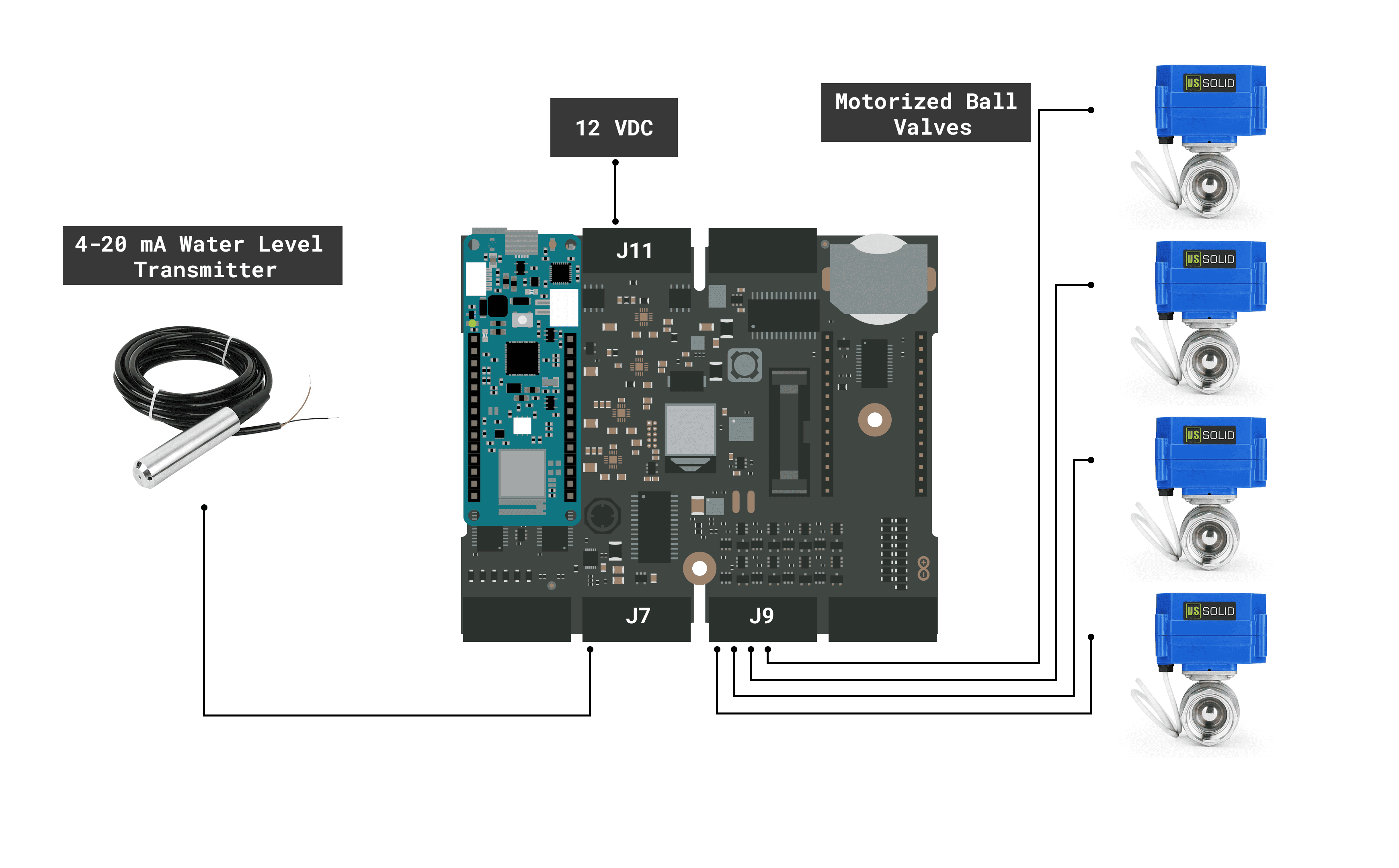
Connexions électriques du système d’irrigation
La carte Edge Control sera alimentée par une alimentation externe de 12 VDC connectée respectivement à BATT+ et GND du connecteur J11.
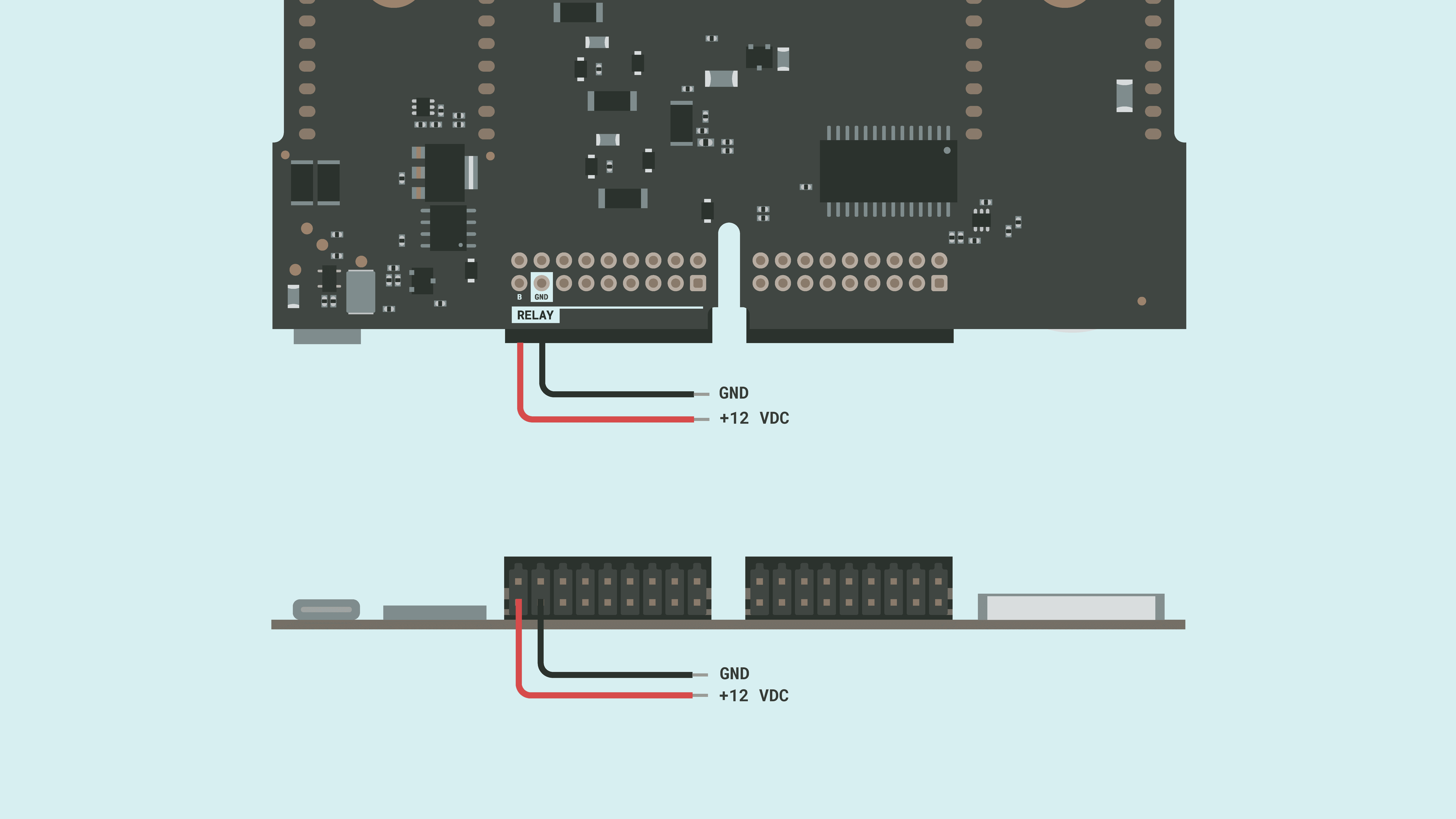
Connexion de l’alimentation électrique
- Les quatre vannes à bille motorisées seront connectées aux sorties à verrouillage (Latching outputs) de la carte Edge Control, via le connecteur J9, de OUT0 à OUT6.
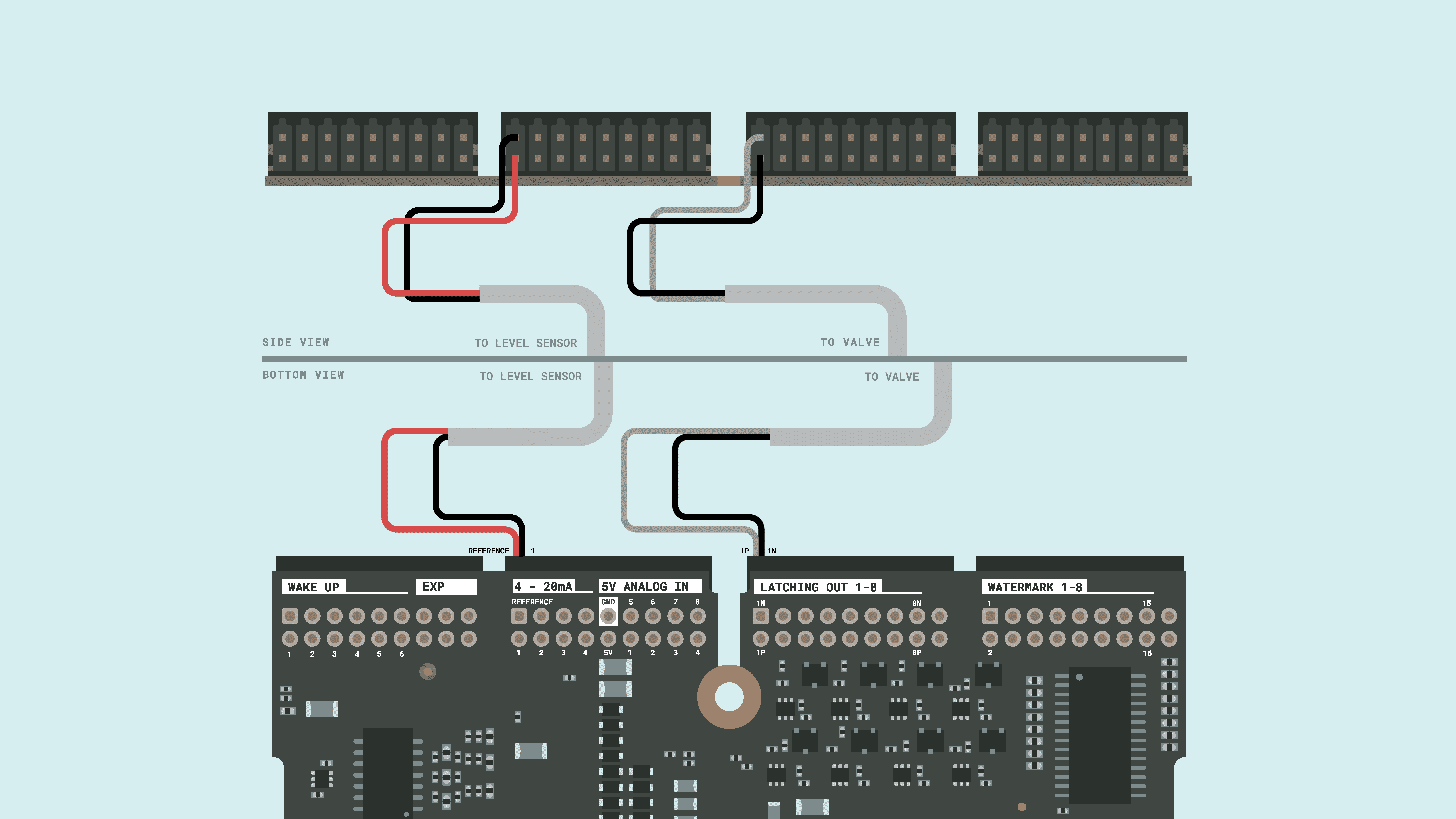
Détail de la connexion de la vanne 2 fils et du capteur 4-20 mA
Vous pouvez également utiliser des vannes motorisées à 3 fils sans aucune modification du code. Consultez ce guide pour plus de détails.
Le transmetteur de niveau d’eau sera connecté à la référence +19 V et à l’entrée 4-20 mA numéro un du connecteur J7.
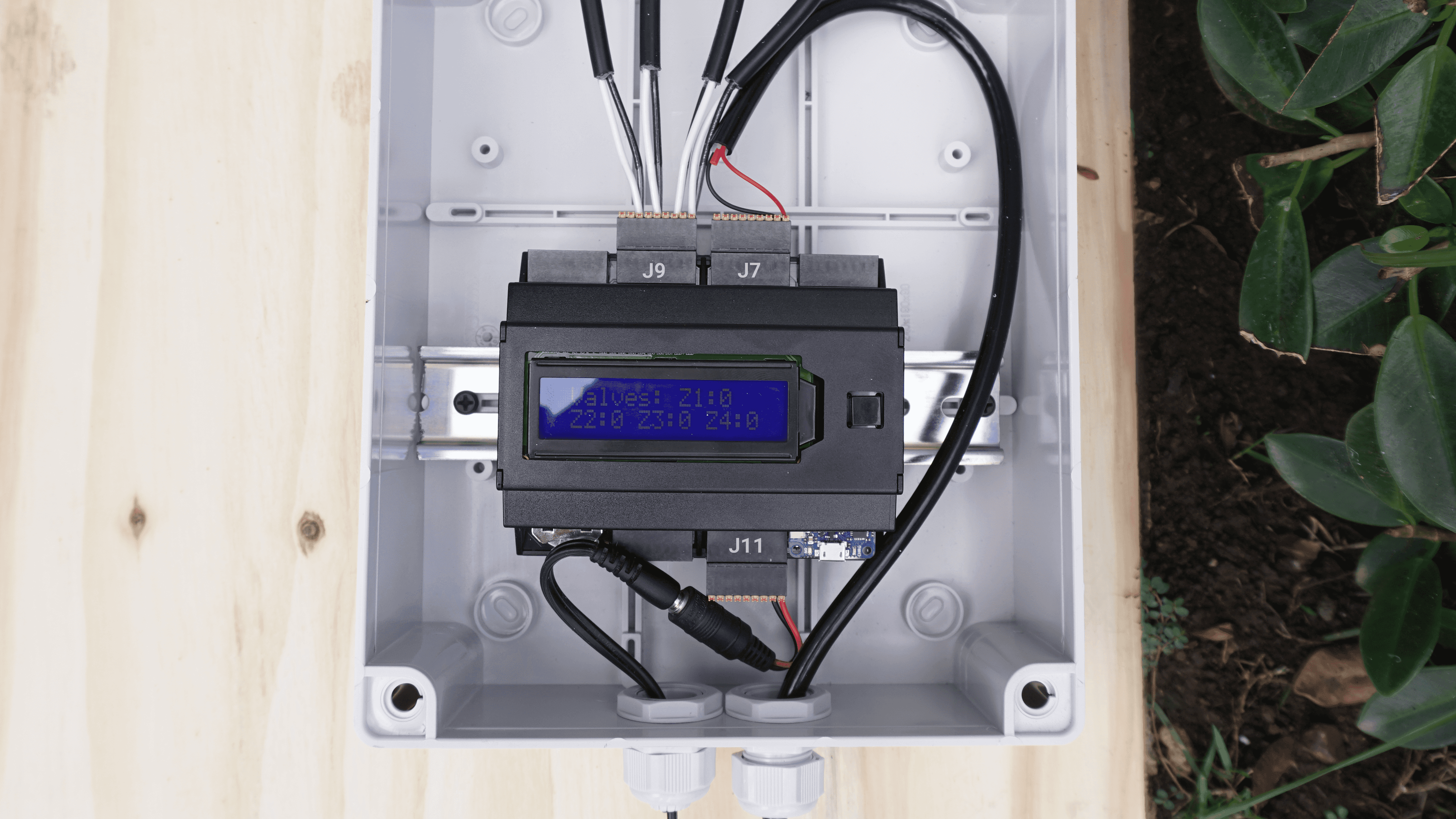
Connexions physiques du projet
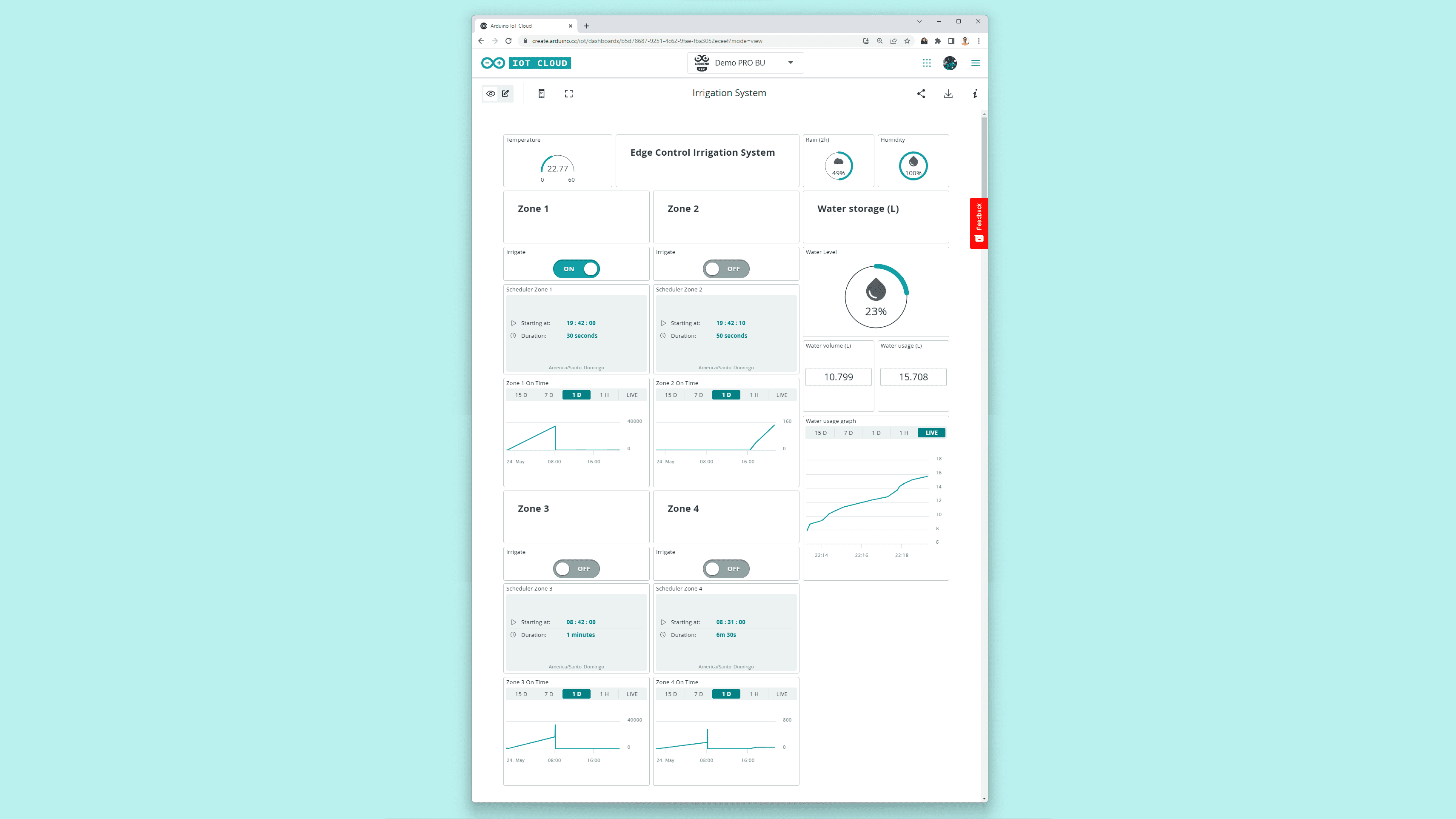
Vue d’ensemble du système d’irrigation intelligent
Le système d’irrigation fonctionne dans son ensemble : il intègre la mesure du niveau d’eau et l’activation des vannes, assurées par l’Edge Control, avec la communication Cloud, réalisée via le MKR WiFi 1010.
L’Edge Control est responsable du suivi du temps grâce à son horloge temps réel intégrée (RTC), afin de programmer l’utilisation des vannes et de savoir quand une journée s’est écoulée. De plus, cette configuration permet également de :
Mesurer le niveau d’eau du réservoir avec un transmetteur de niveau liquide 4-20 mA pour calculer la consommation.
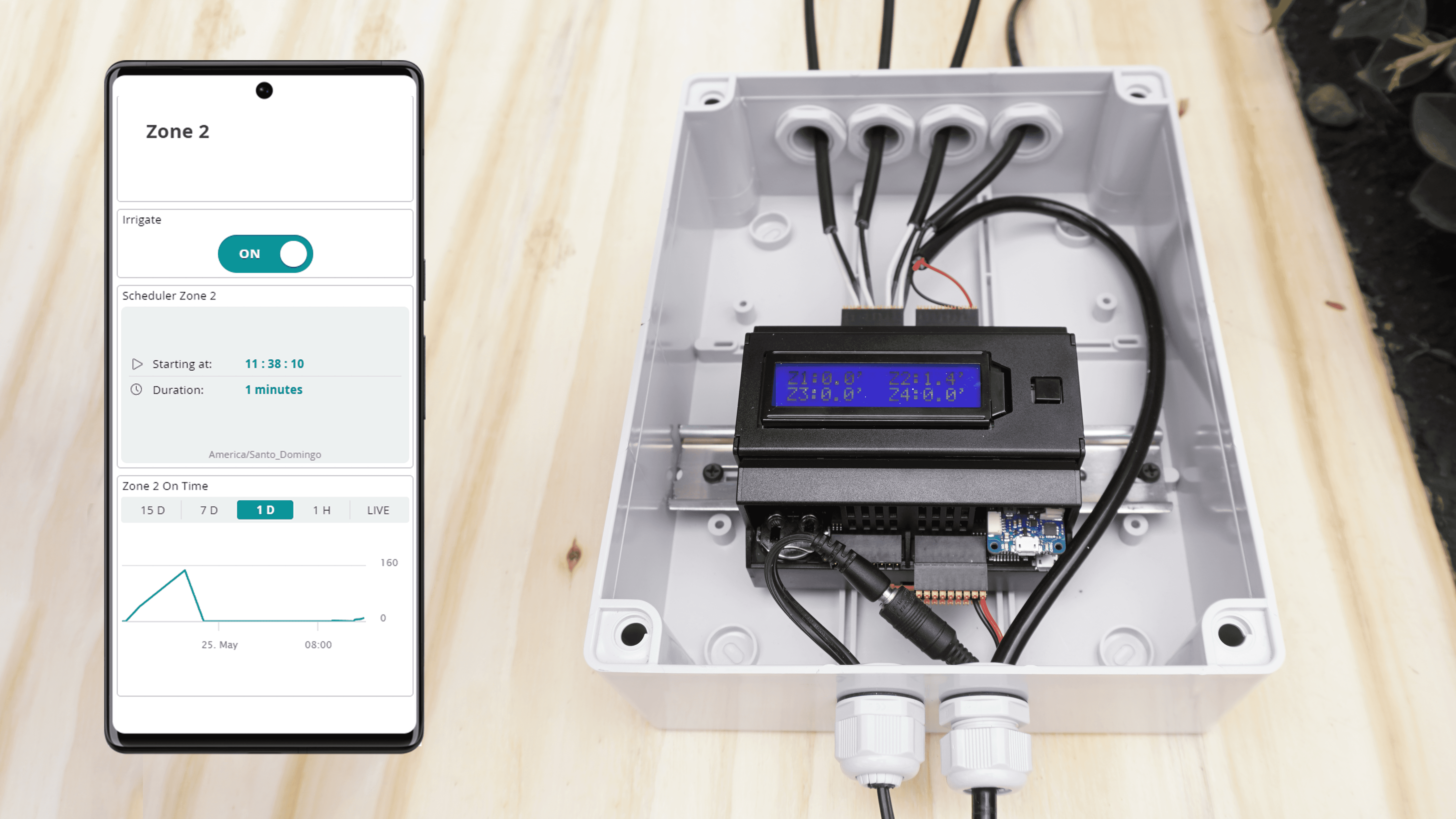
Contrôler un écran LCD affichant le statut des vannes et des minuteries. De plus, le bouton poussoir du LCD peut être utilisé pour activer manuellement les vannes.
Par ailleurs, le MKR WiFi 1010 assure la communication entre le système et le Cloud. Il informe l’Edge Control de toute modification dans le Cloud afin d’activer, désactiver ou configurer une minuterie pour contrôler les vannes. En retour, il transmet les valeurs des capteurs de l’Edge Control vers le Cloud. La communication entre les deux appareils utilise le protocole I2C.
Système d’irrigation intelligent avec Edge Control
Contrôle des vannes
Si une vanne est activée depuis le Cloud, le message « ouverture de la vanne » s’affichera sur l’écran LCD lorsque la vanne s’ouvrira. Si la vanne est activée par une minuterie depuis le Cloud, l’affichage affichera le même message, incluant un compte à rebours du temps d’irrigation restant. Le temps de fonctionnement des vannes est suivi et reporté sur le Cloud afin de permettre une visualisation efficace de la consommation moyenne quotidienne.
Consommation d’eau
À chaque démarrage du système, la quantité d’eau actuelle est mesurée et enregistrée. Ainsi, toute diminution est comptabilisée comme de l’eau consommée. La consommation d’eau est réinitialisée chaque jour pour permettre de suivre la consommation moyenne quotidienne via un graphique dédié dans Arduino Cloud.
Prise en compte des prévisions météorologiques
Le système est capable de connaître les prévisions météorologiques grâce à l’utilisation du MKR WiFi 1010 et de l’API OpenWeather. Si la probabilité de pluie dépasse 90 %, les minuteries d’arrosage automatique seront ignorées et l’irrigation intelligente ne démarrera pas. Cependant, il restera possible d’irriguer manuellement si l’utilisateur le souhaite.
Code Arduino Edge Control
Passons en revue quelques sections importantes du code pour rendre cette application pleinement opérationnelle, en commençant par les bibliothèques nécessaires :
Arduino_EdgeControl.h : active la prise en charge des périphériques de l’Edge Control ; installez-la en la recherchant dans le gestionnaire de bibliothèques.
Wire.h : permet la communication I2C entre l’Edge Control, le MKR WiFi 1010 et les autres périphériques. Cette bibliothèque est incluse dans le Board Support Package (BSP) de l’Edge Control.
Deux fichiers d’en-tête supplémentaires sont inclus dans le code du projet pour gérer des fonctions et structures utilitaires :
SensorValues.hpp : gère les variables partagées entre l’Edge Control et le MKR WiFi 1010 via I2C.
helpers.h : gère les fonctions de l’horloge temps réel (RTC) pour récupérer la date et l’heure locales.
Cette section du code contient également la structure définie pour gérer le nombre d’appuis sur les boutons de l’enclosure, permettant de contrôler manuellement chaque vanne.
#include "Helpers.h"
#include <Arduino_EdgeControl.h>
#include <Wire.h>
#include "SensorValues.hpp"
// The MKR1 board I2C address
#define EDGE_I2C_ADDR 0x05
/** UI Management **/
// Button statuses
enum ButtonStatus : byte {
ZERO_TAP,
SINGLE_TAP,
DOUBLE_TAP,
TRIPLE_TAP,
QUAD_TAP,
FIVE_TAP,
LOT_OF_TAPS
};
Pour économiser de l’énergie et des ressources, l’Edge Control dispose de différentes lignes d’alimentation qui doivent être activées pour alimenter les périphériques internes et externes. Dans ce cas, les lignes 3,3 V, 5 V, batterie, slot MKR1, ainsi que la référence +19 V pour la boucle de courant 4-20 mA du capteur doivent être activées.
Pour gérer toutes les entrées/sorties, l’extendeur d’E/S (I/O Expander), ainsi que l’écran LCD du kit d’enclosure et les entrées des capteurs, doivent être initialisés.
Avec la fonction setSystemClock, une date de référence de départ pour l’horloge temps réel (RTC) est définie. Si vous souhaitez configurer l’heure du RTC selon votre fuseau horaire, utilisez la fonction commentée :
en remplaçant le paramètre par le temps Unix (en secondes) correspondant à votre région.
Il suffit de configurer l’horloge RTC une seule fois et de vous assurer qu’une pile CR2032 3V est installée dans le support de l’Edge Control pour maintenir les réglages de la RTC.
/**
Main section setup
*/
void setup() {
EdgeControl.begin();
Wire.begin();
delay(500);
Serial.begin(115200);
Serial.println(“Init begin”);
// Enable power lines
Power.enable3V3();
Power.enable5V();
Power.on(PWR_3V3);
Power.on(PWR_VBAT);
Power.on(PWR_MKR1);
delay(5000); // wait for the MKR board to boot
Power.on(PWR_19V);
// Init Edge Control IO Expander
Serial.print(“IO Expander initializazion “);
if (!Expander.begin()) {
Serial.println(“failed.”);
Serial.println(“Please, be sure to enable gated 3V3 and 5V power rails”);
Serial.println(“via Power.enable3V3() and Power.enable5V().”);
} else Serial.println(“succeeded.”);
// LCD button definition
pinMode(POWER_ON, INPUT);
attachInterrupt(POWER_ON, buttonPress, RISING);
// Arduino Edge Control ports init
Input.begin();
Input.enable();
Latching.begin();
analogReadResolution(adcResolution);
setSystemClock(__DATE__, __TIME__); // define system time as a reference for the RTC
//RealTimeClock.setEpoch(1684803771-(3600*4)); // use this to set the RTC time once.
// Init the LCD display
LCD.begin(16, 2);
LCD.backlight();
LCD.home();
LCD.print(“Smart Irrigation”);
LCD.setCursor(5, 1);
LCD.print(“System”);
delay(2000);
LCD.clear();
}


You may also like

Projet de station météorologique avec Arduino

LMS WordPress plugin
